Geomatika adalah disiplin ilmu modern yang mengintegrasikan proses akuisisi, pemodelan, analisis, dan pengelolaan data yang bereferensi secara spasial. Dengan berdasar pada kerangka kerja ilmiah geodesi, geomatika menggunakan sensor-sensor terestris, kelautan, udara dan dirgantara untuk memperoleh data spasial dan yang lainnya. Geomatika juga melibatkan proses transformasi data bereferensi spasial dari sumber-sunber yang berlainan ke dalam sistem informasi bersama yang memiliki karakteristik akurasi yang sudah baik.
Istilah Geomatika sendiri berkaitan dengan ilmu, teknologi dan seni yang mengintegrasikan disiplin-disiplin ilmu, antara lain, geodesi, surveying, pemetaan, penentuan posisi (positioning), teknik geomatika, navigasi, kartografi, penginderaan jauh, fotogrametri, SIG, GPS, Geospasial dll.
Data Spasial
Pengertian umum dari istilah data spasial adalah suatu data yang memiliki referensi spasial atau posisi geografis (geo-referenced). Data spasial, seperti juga data untuk berbagai disiplin lain, dapat berupa angka, teks, maupun gambar. Sedangkan posisi yang menjadi acuan tersebut – dari pendekatan statistik spasial dan juga SIG – dapat berupa posisi dalam ruang yang kontinyu (geostatistik), dalam ruang lattice, atau dalam bentuk pola titik (point pattern atau cluster) (Cressie 1993). Gambar 1. memperlihatkan perbedaan ruang referensi spasial yang biasa dipakai sebagai referensi data spasial.
Dengan pendekatan statistik spasial dapat dijelaskan bahwa data spasial merupakan hasil keluaran (outcome) dari pengamatan/percobaan yang dilakukan pada satu posisi geografis tertentu, Z_xi_,dengan Z bisa berisi satu variabel(uni-variate) maupun multi-variabel (multi-variate) yang bisa berasal dari berbagai sumber yang berbeda. Dalam konsep SIG, Z ini dapat dianalogikan sebagai kumpulan basisdata lapisan-lapisan (layers) atribut data tertentu. Sedangkan xiadalah posisi yang bisa satu dimensi (1D), dua dimensi (2D), tiga dimensi (3D), ataupun empat dimensi (4D) dengan dimensi ke-empat adalah dimensi waktu t.
Sebelum era satelit navigasi, georeferensi yang banyak dipakai untuk keperluan geodesi dan pemetaan adalah datum lokal. Elipsoid yang dipilih pada umumnya hanya cocok (fit) untuk menjadi referensi pengukuran dan pemetaan pada daerah itu saja. Dengan alasan tersebut, setiap negara memilih dan mendefinisikan sendiri kerangka referensi dan datum.
Perkembangan globalisasi pada berbagai bidang juga membawa dampak pada kerangka referensi koordinat. Georeferensi yang dipakai saat ini adalah satu sistem kerangka koordinat (datum) yang bersifat global, yaitu WGS (World Geodetic Datum) 1984, yang juga menjadi datum untuk sistem satelit navigasi GPS. Sistem referensi global mulai digunakan saat sistem TRANSIT Doppler dimanfaatkan untuk menentukan posisi sejumlah titik-titik (stasiun) kerangka dasar geodesi dan pemetaan. Saat itu digunakan referensi ellipsoid NWL-9D yang kemudian diadopsi menjadi GRS 1967. Di Indonesia, titik datum yang ditentukan dengan sistem TRANSIT Doppler adalah titik Datum Padang yang kemudian didefinisikan sebagai ID74 (Indonesian Datum 1974). Ketika sejumlah parameter lain ikut diperhitungkan dalam penentuan datum, mulai dirilislah WGS 1972 yang kemudian dipertajam menjadi WGS84 (Seeber 1993).
Global Positioning System (GPS)
Sesuai dengan tujuan pembangunannya, teknologi satelit navigasi GPS telah menjadi satu teknologi yang relatif mudah dan murah untuk mewujudkan posisi geografis dan waktu. Walaupun, tentu ada suatu keterbatasan antara biaya yang diinvestasikan dengan ketelitian (presisi, precision, internal accuracy) dan ketepatan (akurasi, accuracy, reliability) yang akan diperoleh (Seeber 1993, p. 324-326). Faktor-faktor yang mempengaruhi kualitas hasil survai GPS terutama adalah jenis peralatan dan metoda pengukuran serta metoda pengolahan data yang digunakan.
Peralatan penerima sinyal GPS (receiver) bervariasi dari kelas rakitan sendiri, kelas navigasi dengan ketelitian 20 meteran, sampai kelas geodetik yang mampu mengukur sampai ketelitian milimeter. Variasi receiver ini terutama berkaitan dengan jenis jam atom (clock) yang dipakai dan jenis data (kode dan gelombang pembawa) yang bisa direkam (Kaplan 1996).
Dari sisi metoda pengukuran dapat dibedakan antara metoda pengukuran statik dengan pengukuran kinematik. Metoda pengukuran statik mengasumsikan bahwa antenna receiver tidak bergerak terhadap kerangka referensi, sedangkan metoda pengukuran kinematik menggunakan asumsi bahwa antena receiver bergerak terhadap titik referensi. Sedangkan dari sisi metoda pengolahan data, dapat dibedakan antara pengolahan satu titik (single point positioning – SPS, absolute positioning) dan pengolahan baseline (differential positioning, relative positioning) tunggal maupun dalam bentuk jaring.
Berdasarkan variasi-variasi kemungkinan penggunaan teknologi di atas, dapat diurutkan sejumlah kemungkinan aplikasi GPS mulai dari yang paling teliti (dan paling mahal) untuk keperluan ilmiah sampai yang paling seadanya (dan paling murah) untuk keperluan hiburan. Dalam rangka pembangunan informasi spasial, GPS dapat berperan mulai dari realisasi referensi koordinat dengan survai yang sangat teliti sampai pada kegiatan pematokan yang merupakan aplikasi hasil analisis informasi spasial.
Satelit GPS
Satelit GPS pertama kali diluncurkan pada tahun 1978 dan mengorbit pada ketinggian 20.200km dan yang mutakhir (satelit GPS ke-52) diluncurkan 6 November tahun lalu. Satelit GPS tidak bersifat geostasioner –posisi relatif tetap pada garis ekuator, mengorbit satu bidang dengan putaran bumi– seperti satelit yang kita pakai untuk komunikasi internet dan siaran televisi, namn mengorbit dua kali dalam satu hari (kecepatan linearnya mungkin sama dengan kecepatan linear satelit geostasioner, tetapi karena orbitnya lebih rendah bisa mengelilingi bumi dua kali dalam 24 jam, bandingkan dengan kecepatan linear satelit LEO yaitu 8km perdetik, tentunya kecepatan linear satelit MEO lebih tinggi).
Seluruh satelit GPS mengorbit sambil mem-broadcast sinyal ke bumi. Sinyal yang dikirimkan adalah waktu atom epoch, koordinat satelit, inklinasi, kecepatan orbit dan lain sebagainya yang berguna bagi GPS receiver dalam menentukan posisi secara presisi. Sebuah GPS receiver bisa menentukan posisi koordinat lintang/bujur serta elevasi di atas permukaan laut secara tepat apabila menerima sinyal dari empat satelit GPS, jika hanya tiga sinyal yang didapat maka elevasi tidak akan akurat.
Setiap satelit mem-broadcast sinyal yang dibedakan dengan kode CDMA dan perbedaan perioda waktu pada frekuensi yang sama. GPS receiver mengkalkulasi 4 sinyal satelit yang didapat dengan database internal yang sudah terstandar tersedia. Elevasi bisa ditentukan akibat perhitungan delay setiap sinyal dari setiap satelit, delay ini kemudian dianggap sebagai jarak (range), disebut kemudian sebagai pseudorange. Ketika GPS receiver menerima 4 sinyal satelit maka pada saat itu posisi GPS receiver menjadi irisan empat garis sinyal satelit, dari sinilah posisi presisi GPS receiver bisa ditentukan, yaitu koordinat Lintang, Bujur dan Elevasi. Referensi waktu pada GPS receiver tidak harus akurat, cukup dengan tingkat akurasi dalam jangka yang pendek (misalnya cukup dalam hitungan menit) karena untuk selanjutnya referensi waktu akan didapatkan dari sinyal satelit, yang merupakan waktu atom, atomic clock.
Penentuan posisi GPS pun tak luput dari faktor kesalahan, kesalahan tersebut bisa timbul dari:
Referensi waktu, untuk ketepatan minimal 4 sinyal satelit harus didapat.
Ionosfer, kondisi cuaca memengaruhi delaynya waktu penerimaan sinyal, sebagai koreksi satelit mengirimkan sinyal lain pada frekuensi yang berbeda, sebagai komparasi perhitungan untuk mencapai presisi.
Multipath, GPS receiver tidak hanya menerima sinyal dari satelit tapi bisa saja dari pantulan, dari perangkat lain di daratan dan sebagainya. GPS mengirimkan sinyal pada frekuensi L1 (1575, 42MHz), L2 (1227, 60MHz) yang dipakai untuk koreksi karena ionosfer, L3 (1381, 05MHz), L4 (1841, 40MHz) dan L5 (1176, 45MHz).
Selective Availability, awalnya kalangan sipil tidak bisa menangkap semua sinyal GPS namun setelah Bill Clinton membuka hak pemakaian GPS ini maka kalangan sipil bisa lebih mendapatkan kepresisian posisi GPS.
Ke depan mungkin perangkat telepon selular akan dilengkapi GPS dan dibuat massal, sehingga pengguna dan operator mampu menjejak posisi. Salah satu kelemahan dasar GPS adalah receiver harus berada di ruang terbuka. Mungkin juga suatu saat BTS selular GSM dan CDMA bisa berfungsi sebagai relay satelit GPS, sehingga di dalam ruangan atau di basement posisi bisa ditentukan secara tepat.
Kegunaan GPS Secara Umum
Militer
GPS digunakan untuk keperluan perang, seperti menuntun arah bom, atau mengetahui posisi pasukan berada. Dengan cara ini maka kita bisa mengetahui teman dan lawan untuk menghindari salah target ataupun menentukan pergerakan pasukan.
Navigasi
GPS banyak juga digunakan sebagai alat navigasi seperti kompas. Beberapa jenis kendaraan telah dilengkapi dengan GPS untuk alat bantu navigasi dengan menambahkan peta, sehingga dapat digunakan untuk memandu pengendara mengetahui jalur yang sebaiknya dipilih untuk mencapai tujuan yang diinginkan.
Sistem Informasi Geografis
Untuk keperluan Sistem Informasi Geografis, GPS sering juga diikutsertakan dalam pembuatan peta, seperti mengukur jarak perbatasan ataupun sebagai referensi pengukuran.
Pelacak_kendaraan
Kegunaan lain GPS adalah sebagai Pelacak kendaraan, dengan bantuan GPS pemilik kendaraan/pengelola armada bisa mengetahui ada di mana saja kendaraan/aset bergeraknya berada saat ini.
Pemantau gempa
Bahkan saat ini, GPS dengan ketelitian tinggi bisa digunakan untuk memantau pergerakan tanah, yang ordenya hanya mm dalam setahun. Pemantauan pergerakan tanah berguna untuk memperkirakan terjadinya gempa, baik pergerakan vulkanik ataupun tektonik.
Pada lingkup penelitian, GPS dapat digunakan untuk beberapa studi seperti:
Geodinamika dengan menempatkan titik- titik pantau di beberapa lokasi yang dipilih, secara periodik maupun kontinyu untuk ditentukan koordinatnya secara teliti dengan menggunakan metode survei GPS.
Ground deformation pada tubuh gunungapi dengan cara menempatkan beberapa titik di beberapa lokasi yang dipilih, ditentukan koordinatnya secara teliti dengan menggunakan metode survei GPS. Dengan mempelajari pola dan kecepatan perubahan koordinat dari titik-titik tersebut dari survei yang satu ke survei berikutnya, maka karakteristik ground deformation pada tubuh gunung api akan dapat dihitung dan dipelajari lebih lanjut.
Studi mengenai ionosfer dan troposfer. Satelit GPS memancarkan sinyal-sinyal gelombang elektromagnetik yang sebelum diterima oleh antena receiver GPS akan melewati medium lapisan-lapisan atmosfer yaitu ionosfer dan troposfer. Dalam kedua lapisan ini, sinyal GPS akan mengalami gangguan (bias) sehingga jarak yang dihitung akan memberikan nilai yang mengandung kesalahan. Jarak digunakan untuk menghitung posisi titik. Dalam lingkup kajian GPS, kedua lapisan ini menjadi bias tersendiri yang harus dikoreksi sebelum menentukan posisi titik.
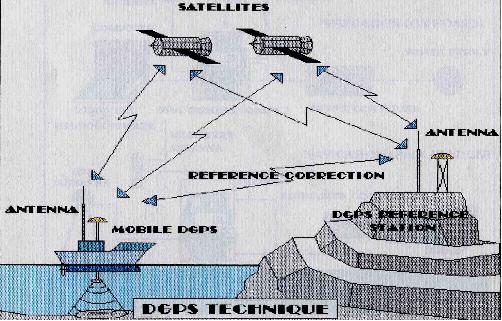
Studi oseanografi dengan GPS buoy system digunakan diantaranya untuk penentuan pasut lepas pantai, pasut pantai, studi pola arus, tsunami EWS, dan lain-lain. GPS mampu memberikan ketelitian posisi sampai dengan ketelitian sentimeter bahkan milimeter. Untuk mencapai ketelitian yang tinggi dengan menggunakan GPS dalam studi GPS Buoy digunakan metoda kinematik diferensial baik itu secara real time (RTK) maupun cinematic post processing.
Untuk beberapa kasus biasa digunakan Differential GPS (DGPS).
Studi gempa bumi. Data GPS dapat dengan baik melihat deformasi yang mengiringi tahapan mekanisme terjadinya Gempa Bumi. Studi mengenai tahapan mekanisme gempa ini akan sangat berguna dalam melakukan evaluasi potensi bencana alam gempa bumi, untuk memperbaiki upaya mitigasi dimasa datang.
Meskipun ketelitian GPS sudah cukup akurat, namun kelemahan GPS adalah ketika melakukan pengukuran komponen tinggi. Komponen tinggi GPS mempunyai ketelitian yang lebih rendah dibandingkan komponen horisontal disebabkan oleh faktor geometri satelit yang tidak memungkinkan pengamatan di bawah horison, sehingga kekuatan ikatan jaring untuk komponen tinggi lebih lemah, kemudian adanya beberapa bias seperti bias troposfer yang akan mempengaruhi tingkat ketelitian (memperjelek ketelitian) yang lebih pada komponen tinggi. Hasil penelitian seorang engineer GPS bernama Jaldelhag (1995) menyatakan bahwa ketelitian komponen tinggi GPS lebih rendah sekitar 3 kalinya ketelitian horizontal. Saat ini telah banyak aplikasi dari teknologi GPS untuk memonitor land subsidence (penurunan tanah), platform (struktur) subsidence, inflasi dan deflasi gunung api yang memanfaatkan komponen tinggi (tinggi elipsoid) yang diberikan sistem GPS.
Di Indonesia sendiri, GPS telah berhasil digunakan dalam studi geodinamika di daerah Sulawesi, studi mekanisme gempa bumi aceh, pemantauan deformasi gunung api di Jawa dan Bali dan banyak studi kasus lain yang dilakukan oleh Kelompok Keilmuan Geodesi Mahasiswa Fakultas Teknik Sipil dan Lingkungan Institut Teknologi Bandung.
Pengukuran dan Pemetaan Titik Dasar Teknik
Titik-titik dasar teknik diperlukan sebagai kerangka dasar referensi nasional. Secara sederhana dapat dijelaskan bahwa titik-titik ini diperlukan untuk pemetaan bidang tanah secara nasional, di mana letak, ukuran, luas dan dimensi lain dari suatu bidang tanah dapat diketahui dan direkonstruksi secara tepat dan akurat.
Tingkatan titik dasar teknik dibagi menjadi lima tingkatan, yaitu: titik dasar orde 0, orde 1, orde 2, orde 3, dan orde 4. Titik dasar orde 0 dan 1 dilaksanakan dan dibangun oleh Badan Koordinasi Survey dan Pemetaan Nasional (BAKOSURTANAL). Titik dasar orde 2 dan 3 dilaksanakan oleh BPN Pusat, sedangkan titik dasar orde 3 dapat dilaksanakan oleh Kantor Wilayah BPN Propinsi, dan titik dasar orde 4 umumnya dilaksanakan oleh Kantor Pertanahan Kabupaten/Kota.
Pengukuran titik dasar teknik orde 2, 3, dan 4 dilaksanakan dengan menggunakan metoda pengamatan satelit atau metoda lainnya. Metoda yang dimaksud adalah penentuan posisi dengan Global Positioning System (GPS). Sedangkan penetapan titik dasar teknik orde 4 umumnya dilaksanakan melalui pengukuran terestris dengan cara perapatan dari titik-titik dasar orde 3.
GPS adalah sistem penentuan posisi dan radio navigasi berbasis satelit yang dapat digunakan oleh banyak orang sekaligus (simultan) dan dalam segala keadaan cuaca, memberikan posisi dan kecepatan tiga dimensi secara teliti, dan juga informasi mengenai waktu, secara kontinyu di seluruh dunia. Dengan penghapusan Selective Availability (SA) pada sistem GPS oleh Amerika Serikat, maka ketelitian posisi absolut secara real time yang tinggi dapat meningkat secara signifikan.
Sistem koordinat nasional menggunakan koordinat proyeksi Transverse Mercator Nasional dengan lebar zone 3 derajat atau kemudian disebut TM-3 derajat. Sedangkan model matematik bumi sebagai bidang referensi adalah spheroid pada datum WGS-1984 (Sistem Koordinat Kartesian Terikat Bumi). Pusatnya berimpit dengan pusat massa bumi, sumbu Z-nya berimpit dengan sumbu putar bumi yang melalui CTP (Conventional Terrestrial Pole), sumbu X-nya terletak pada bidang meridian nol (Greenwich), dan sumbu Y-nya tegak lurus sumbu-sumbu X dan Z dan membentuk sistem tangan kanan.
(Sumber: PMNA/KaBPN No.3 Tahun 1997 dan DR. Hasanuddin Z. Abidin: Penentuan Posisi Dengan GPS dan Aplikasinya; Penghapusan SA pada Sistem GPS dan Dampaknya Bagi Survei dan Pemetaan).
Pengukuran dan Pemetaan Bidang Tanah
Melalui pengikatan kepada titik-titik dasar orde 4, maka dilaksanakan pengukuran tanah bidang per bidang. Bidang-bidang tanah hasil pengukuran kemudian dipetakan dalam Peta Dasar Pendaftaran. Peta ini berskala 1:1000 atau lebih besar untuk daerah perkotaan, 1:2500 atau lebih besar untuk daerah pertanian, dan 1:10000 atau lebih kecil untuk daerah perkebunan besar. Peta ini harus mempunyai ketelitian planimetris lebih besar atau sama dengan 0,3 mm pada skala peta.
Sebelum suatu bidang tanah diukur, wajib dipasang dan ditetapkan tanda-tanda batasnya, setelah mendapat persetujuan dari pemilik tanah yang berbatasan langsung. Apabila sampai dilakukannya penetapan batas dan pengukuran bidang tanah tidak tercapai kesepakatan mengenai batas-batasnya (terjadi sengketa batas), maka ditetapkan batas sementara yang menurut kenyataannya merupakan batas bidang-bidang tanah yang bersangkutan. Kepada yang bersengketa diberitahukan agar menyelesaikannya melalui Pengadilan.
Pengukuran bidang tanah dapat dilakukan secara terestrial, fotogrametrik, atau metoda lainnya. Pengukuran terestris adalah pengukuran dengan menggunakan alat ukur theodolite berikut perlengkapannya seperti: pita ukur, baak ukur, electronic distance measurement (EDM), GPS receiver, dan lain sebagainya.
Adapun pemetaan secara fotogrametrik adalah pemetaan melalui foto udara (periksa foto simulasi di atas). Hasil pemetaan secara fotogrametrik berupa peta foto tidak dapat langsung dijadikan dasar atau lampiran penerbitan Sertipikat Hak atas Tanah. Pemetaan secara fotogrametrik tidak dapat lepas dari referensi pengukuran secara terestris, mulai dari penetapan ground controls (titik dasar kontrol) hingga kepada pengukuran batas tanah. Batas-batas tanah yang diidentifikasi pada peta foto harus diukur di lapangan.
Penggunaan GPS dan Citra Satelit dalam Survey Teknis dan Desain dalam Koridor
Bila anda akan merencakanan suatu koridor baru baik untuk jalan rel maupun jalan raya, maka anda akan dihadapkan pada kurangnya informasi yang uptodate soal peta dasar topografi (Peta Rupa Bumi Indonesia). Apalagi daerah yang didesain adalah wilayah Sumatera. Beberapa masalah yang ada adalah:
Berdasarkan informasi dari pihak BAKOSURTANAL, peta topografi atau rupa bumi untuk sebagian besar wilayah Sumatera baik yang berupa kertas maupun digital merupakan terbitan Dinas Topografi AD tahun 1974 dengan skala 1:50000.
Tidak tersedianya peta skala 1:25000 dapat diatasi dengan banyaknya data di internet berupa peta satelit baik berupa foto satelit Quick Bird ataupun citra satelit IKONOS produksi tahun 2000-2002.
Menurut Ditjen Geologi dan Sumber Daya Mineral, peta geologi berskala 1:100.000 – 1:250.000 memakai peta US ARMY terbitan tahun 1953 sebagai peta dasar. Datum peta ini adalah Datum Batavia (Bessel 1846). Transformasi datum harus dilakukan ke datum internasional WGS84 atau datum Indonesia Datum IDN95.
Peta-peta tersebut diatas tidak lengkap dalam menampilkan kontur. Sebagai tambahan referensi untuk terrain, maka data SRTM (Shuttle Radar Topography Mission) dari NASA tahun 2000, dapat menghasilkan kontur dengan kerapatan sampai 0.5 m.
Pemakaian GPS tipe navigasi akan diperlukan untuk melengkapi peta 1:50.000 diatas dan tracing desain alinyemen baru di lapangan. GPS tipe ini mempunyai akurasi 5-15 meter.
Agar semua peta, baik itu peta topografi, peta geologi, peta tata guna lahan maupun peta kepemilikan tanah yang ada akan dirubah dan digitasi kedalam peta GIS sehingga dapat dilakukan superimpose terhadap layer-layer yang ada. Dengan demikian dapat terlilhat apakah alinyemen yang baru melewati daerah patahan atau tidak, melewati lahan milik siapa dan lainnya.
Inderaja untuk Pertanian dengan GPS
Teknologi penginderaan jauh (inderaja) memiliki banyak kegunaan untuk diaplikasikan di bidang pertanian, di antaranya untuk memonitor kondisi tanaman, estimasi produksi, deteksi hama dan penyakit tanaman, mengontrol penggunaan herbisida, pemupukan, kekurangan air, dan bahkan pendugaan sifat tanah.
Di antara aplikasi inderaja untuk pertanian, pemantauan kondisi tanaman adalah yang paling banyak digunakan. Sejak 1990-an, National Agricutural Statistic Service (NASS) menggunakan data Advanced Very High Resolution Radio meter (AVHRR) dari satelit National Oceanographic and Atmospheric Administration (NOAA) untuk memonitor kondisi tanaman di Amerika Serikat. Pengaruh banjir besar terhadap tanaman pertanian di Midwest pada tahun 1993 dan awal musim dingin 1995, kekeringan parah di daerah gandum pada tahun 1996, dan keterlambatan tanam pada tahun 1996 di sentra produksi gandum telah dimonitor menggunakan data tersebut. Di Thailand, penelitian menggunakan Japanese Earth Resources Satelite (JERS) bertujuan untuk mengkaji kekeringan.
Di masa yang akan datang, teknologi inderaja dapat digunakan secara komersial, seperti pengelolaan lahan perkebunan secara precision farming system agar lebih efisien. Untuk hamparan lahan yang lebih luas, misalnya hamparan lahan pertanian di dataran rendah atau dataran tinggi yang mengharuskan adanya perlakuan budi daya yang bervariasi, telah dikembangkan metode precision agriculture yang mengkombinasikan data remote sensing dengan GPS dan GIS.
Hal yang menarik adalah pekembangan aplikasi inderaja untuk tanaman komersial dan asuransi tanaman. Di bidang komersialisasi pertanian, data inderaja digunakan untuk identifikasi, inventarisasi areal tanam, dan estimasi potensi hasil dan nilai panen. Informasi inderaja dapat juga digunakan untuk mendeteksi kondisi hara lahan. Data tentang kondisi kerusakan berguna untuk pengelolaan tanaman dan akurasi perhitungan pembayaran asuransi tanaman.
Di Arkansas, Amerika Serikat, data satelit Landsat 5 membantu para pengacara untuk membatalkan klaim kerusakan tanaman kapas yang terjadi beberapa tahun sebelumnya, yang sebenarnya tidak pernah ditanami. Di Eropa, pemerintahan menggunakannya untuk pengelolaan subsidi petani. Salah satu data yang digunakan untuk tujuan tersebut adalah European Remote Sensing (ERS).
Teknologi inderaja untuk pertanian perlu diadopsi dan diaplikasikan di Indonesia yang merupakan negara agraris.
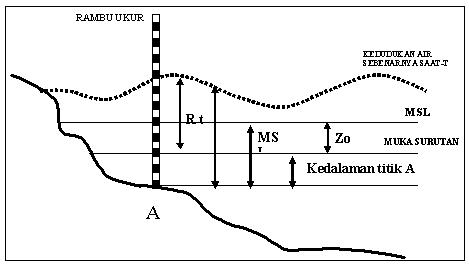
GPS untuk Mengukur Muka Laut
Pemanfaatan teknologi Global Positioning System (GPS) untuk mengukur tinggi muka laut, dinilai memberikan hasil yang lebih baik dibandingkan teknologi lainnya. Sejumlah cara digunakan untuk mengukur tinggi muka laut. Di antaranya dengan memanfaatkan satelit altimetri. Namun, altimetri ternyata memiliki resolusi rendah sebab pengukuran dilakukan secara global. Apalagi jika telah mendekati pantai maka ketelitiannya semakin berkurang.
Selain itu, pengukuran melalui stasiun pasang surut yang dilengkapi sumur atau pipa yang terhubung ke laut. Pasang surut air dapat terukur melalui sensor yang ada di dalam stasiun tersebut. Teknik ini memiliki keterbatasan karena hanya mampu melakukan pengukuran di sekitar lokasi pasang surut saja.
Jika pengukuran tinggi muka laut di lokasi yang agak jauh dari pantai maka ketelitiannya akan berkurang. Pasalnya kita harus membuat pemodelan lagi, sedangkan seperti kita ketahui selama ini, pengkuran pasang surut air sifatnya time dependent dan spatial dependent. Melalui penggunaan teknologi Global Positioning System (GPS) ini, keterbatasan dari kedua teknik pengukuran dapat tertutupi. Ini Karena GPS mampu mengukur baik di daerah pantai maupun di bagian laut yang bergelombang sekalipun.
Meski demikian, isu yang paling penting sekarang adalah pembangunan infrastruktur database yang lebih baik. Sebab, selama ini di Indonesia, infrastruktur tak terbangun dengan baik. Pembangunan infrastruktur yang lebih baik akan memberikan referensi untuk mengetahui tinggi muka laut lebih baik pula. Selama ini memang ada stasiun pasang surut yang berada di sejumlah wilayah tetapi setiap tempat itu memiliki karakter pasang surut yang berbeda.
Di samping itu, teknologi GPS memungkinkan untuk mencegah kerugian negara dalam menentukan batas wilayah. Perbatasan wilayah laut suatu negara biasanya ditentukan dengan menghitung garis pantai, berdasarkan air pasang yang paling tinggi atau keadaan air yang paling surut, melalui stasiun pasang surut.
Padahal, stasiun tersebut kerap memiliki karakter yang berbeda-beda di setiap wilayah. Akibatnya hasil pengukuran pun berbeda. Tak heran jika banyak nelayan dari negara asing yang dengan tenangnya mengeruk kekayaan laut kita, seakan dianggap wilayah laut negaranya.
Sumber: http://fadlysutrisno.wordpress.com [15/07/2010]